MicroLabBox II
最精巧的實驗室用控制策略原型驗證設備,MicroLabBox II 是一種結合了小尺寸、低成本、高演算能力以及彈性的實驗室用研發設備,讓使用者便利且快速的完成控制策略測試驗證、資料量測等工作必要的設定,使新開發的控制策略可以快速實現。
最精巧的實驗室用控制策略原型驗證設備,MicroLabBox II 是一種結合了小尺寸、低成本、高演算能力以及彈性的實驗室用研發設備,讓使用者便利且快速的完成控制策略測試驗證、資料量測等工作必要的設定,使新開發的控制策略可以快速實現。

MicroLabBox II 是一種結合了小尺寸、低成本、高演算能力以及彈性的實驗室用研發設備,讓使用者便利且快速的完成控制策略測試驗證、資料量測等工作必要的設定,使新開發的控制策略可以快速實現。超過 100 種不同類型的 I/O 通道使 MicroLabBox 成為可用於機電一體化研究和開發領域的多功能系統,適用於機器人、醫療工程、電力驅動控制、可再生能源、汽車與航太相關研發工作。
高計算能力結合非常低的 I/O 延遲,提供了很好的即時性能。可編程FPGA為您提供高度的靈活性,並允許您運行非常快的控制迴路,如電動馬達控制和震動噪音消弭等應用。MicroLabBox II 擁有 dSPACE 軟體套件完善的支援,包括了用於 Simulink 整合 IO 通道和控制策略模型的 Real-Time Interface (RTI) ,以及提供圖形界面和虛擬儀表進行操作的實驗操作軟體 ControlDesk® Next Generation。

MicroLabBox II 有兩種不同的機型可以選擇,各自提供了不同的 I/O 通道連接面板位置。一般稱為T 型的 MicroLabBox II 將各種 I/O 通道接口置於機體的頂部,提供了 D 形頭與圓形的 BNC 接頭,可以相當方便的連結,適合用在有開闊的桌面工作空間的環境。通稱F型的前置介面型 MicroLabBox II 將 I/O 介面的連結置於機身正面,提供了多個 D形頭讓使用者連接必要的儀器設備,適用於其他實驗室設備或儀器疊合放置,或置於機櫃的環境。
跟其他 dSPACE 的產品相同,MicroLabBox II 也一樣可以透過和各種不同的 RTI 和 dSPACE 軟體結合發揮更多功能,這些軟體有的會和套件同捆提供,有的則是看客戶的需求進行選購。
同捆提供軟體套件
依需求選購套件
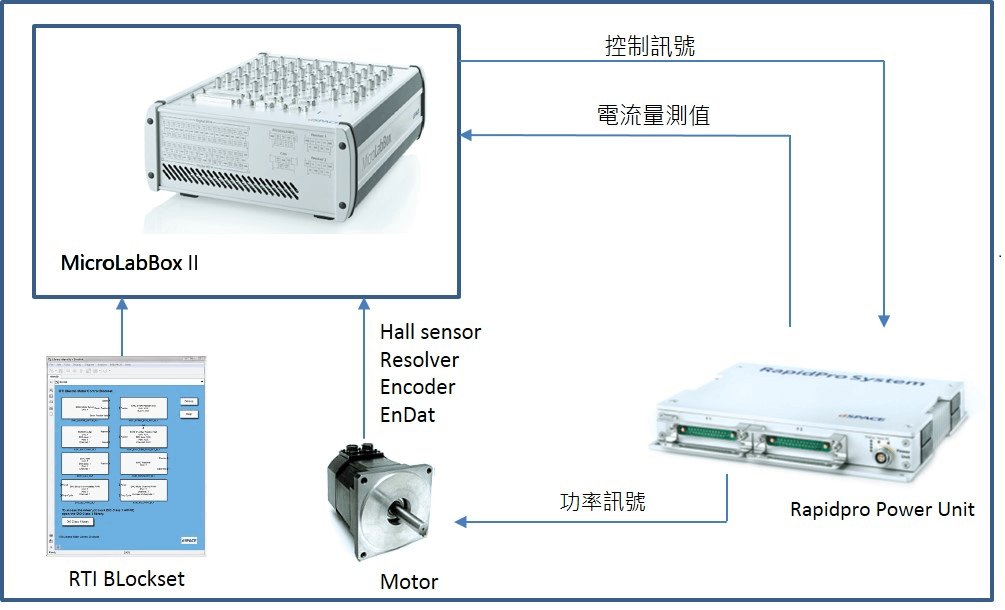
MicroLabBox II 是開發馬達控制策略的理想工具,適用於多種不同的馬達控制情境包括非同步馬達,直流無刷馬達,永磁同步馬達等等,dSPACE 提供的 RTI Electric Motor Control 可以提供便利的介面來設定和運用 MicroLabBox II 上面的各種輸入輸出介面。
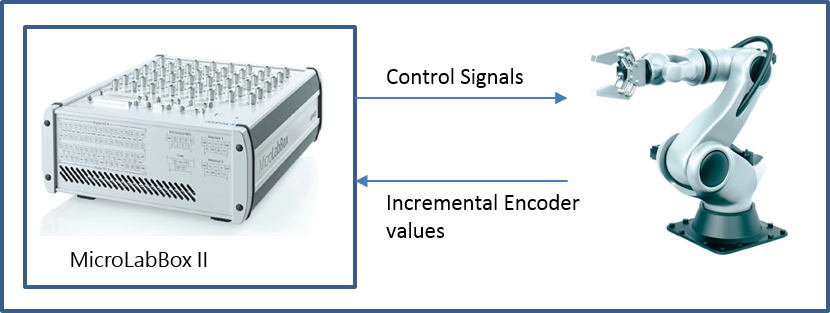
MicroLabBox II 配備了許多可以用在機器人研發工作的輸入輸出介面,在下面的示意圖裡,MicroLabBox II 取代了 position controller 並且接收 encoder 訊號來判斷機械手臂現在的位置和轉動角度,MicroLabBox II 的處理器使用這些資料作控制策略的運算,再對機械手臂送出位置和速度的控制命令,透過 Simulink 的環境可以快速的開發各種控制策略並且在這樣的硬體配置下進行測試。
在針對耳機、手機、車輛或是工業設施或是工具機的震動和噪音等問題進行的主動式噪音和震動消弭的研發工作上,訊號處理一直是很大的挑戰,比方說在主動式噪音消弭研發工作上,用來消弭噪音的音波波形必須在原始的噪音接觸到麥克風或是進入要消弭噪音的空間之前就計算好並且發出,MicroLabBox II 配備的高速處理器以及低遲滯的輸入輸出通道會非常適合用來開發各種控制策略和演算法來對應震噪問題,要求更高的時候,也可以進一步對 MicroLabBox II 的 FPGA 進行程式編譯來處理標準更高的問題。

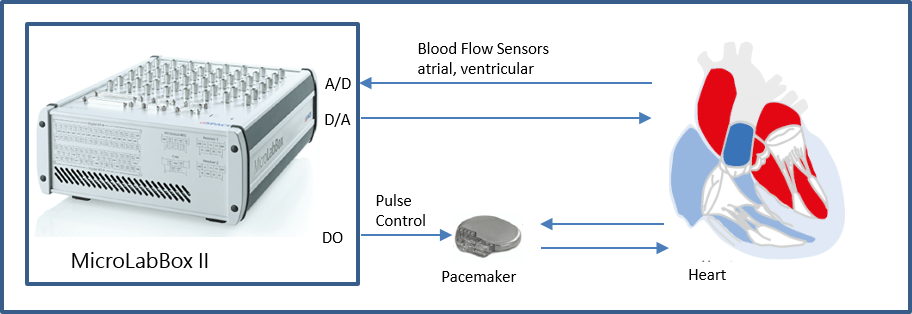
就醫療器材而言,安全性和可靠性是研發工作中必須最注重的因素,任何新的功能都必須做最佳化的設計並且進行許多額外的測試,在許多案例中,訊號的擷取和前處理都是要研發工作中要對環境作額外整合的部分,但在使用 MicroLabBox II 時可以把額外的或是計算量較大的濾波或是訊號分析等前處理工作交給 MicroLabBox II 搭載的 FPGA 模組來處理。當訊號品質的要求特別高時,也可以將 BNC 線直接連結在 MicroLabBox II 上,這樣可以在處理類比訊號時將外界對於訊號的干擾減到最低,大幅提升訊號品質。
在研發的過程中或是工作完成之後,MicroLabBox II 同時也可以作為一個測試系統來使用,可以藉由作為測試用的演算法或是量測資料模擬來測試環境,進行更完整的測試,讓產品更成熟,節省時間和成本,也降低人體臨床測試的風險。