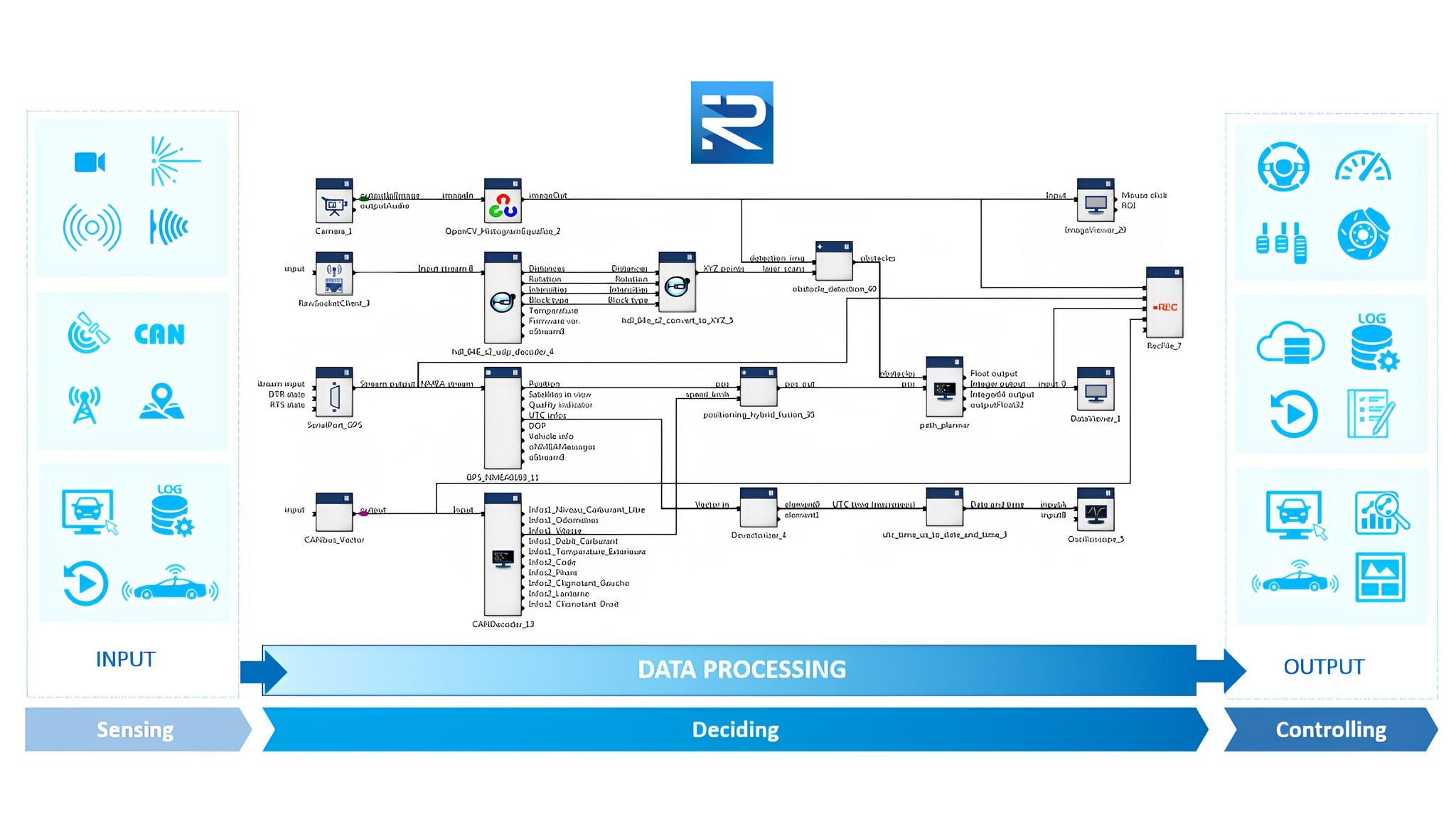
RTMaps (Real-Time Multisensor Applications)
是 dSPACE 提供專門用於多感測器資料處理與同步的軟體平台特別適合自動駕駛、機器人、ADAS 等應用場景以下是它的功能和應用:
產品系列
Products
資料科學
網路通訊
其他應用軟體
硬體及周邊
最新活動
News
產品新知
Blogs
關於我們
About Us
聯絡我們
Contact Us
是 dSPACE 提供專門用於多感測器資料處理與同步的軟體平台特別適合自動駕駛、機器人、ADAS 等應用場景以下是它的功能和應用:
台北總公司
(02) 2505-0525
(02) 2503-1680
高雄辦公室
(07) 229-8600
(07) 229-8660
客服資訊
0800-099-900